pi & zelfrijdende auto’s

Foto: Roberto Nickson / Unsplash.com
Onoplettende chauffeurs, rondrennende kinderen en bejaarden op hun veel te snelle e-bikes: autorijden is levensgevaarlijk als je even niet oplet achter het stuur. Toch zijn er heel wat bedrijven zoals Google, Aurora en Tesla die al een tijd bezig zijn met het ontwikkelen van een zelfrijdende auto. Maar hoe werkt dat eigenlijk? Hoe kan het dat een auto zelf de hele omgeving in de gaten kan houden?

Een zelfrijdende auto van Uber met een chauffeur achter het stuur voor eventuele ingrepen. Bron: The New York Times.
Om veilig deel te nemen aan het verkeer moet een zelfrijdende auto net zo goed kunnen kijken als een normale bestuurder. En als het even kan nog beter. In het plaatje hierboven zie je allerlei meetapparatuur op het dak van de auto. Een deel daarvan bestaat uit camera’s die slim zijn gepositioneerd zodat er een 360-view van de omgeving ontstaat. Deze camera’s kunnen de omgeving in hoge kwaliteit bekijken. Bovendien zijn de beelden in kleur, waardoor verkeersborden correct worden afgelezen. Er zit alleen wel een nadeel aan deze camera’s. Met camera’s alleen lukt het de auto niet om diepte te zien. Anders gezegd: de auto kan nog niet, zoals wij, kijken in 3D.
Een 3D puntenwolk van een weg en de omgeving naast de weg. Bron TowardsDataScience.
Om dit probleem op te lossen zit er op het dak van de auto nog iets anders: Lidar. De Lidar-techniek zorgt ervoor dat zelfrijdende auto’s hun omgeving omzetten in een 3D puntenwolk zoals je hierboven ziet. Lidar-sensoren schieten namelijk onzichtbare laserstralen af op voorwerpen in de omgeving. De voorwerpen kaatsen de laserstralen weer terug naar de sensoren en op deze manier berekent de auto de afstand tot het voorwerp. In de animatie hieronder is dit proces mooi weergeven. Door Lidar wordt er dus diepte toegevoegd aan de omgeving.

Een animatie van Lidar-techniek op zelfrijdende auto’s. Bron Waymo / The Unlockr.
Het voordeel van Lidar is dus diepte en een 3D-view. Het voordeel van normale camera’s is kleur en de kwaliteit van de opname in 2D. De zelfrijdende auto wil deze twee voordelen graag combineren. Daarvoor moet het de 3D beelden samenvoegen met de 2D beelden. Op deze manier heeft de auto de omgeving in hoge kwaliteit tot zijn beschikking en kan het tegelijkertijd inschatten hoe ver ieder punt in de omgeving van de auto is verwijderd.
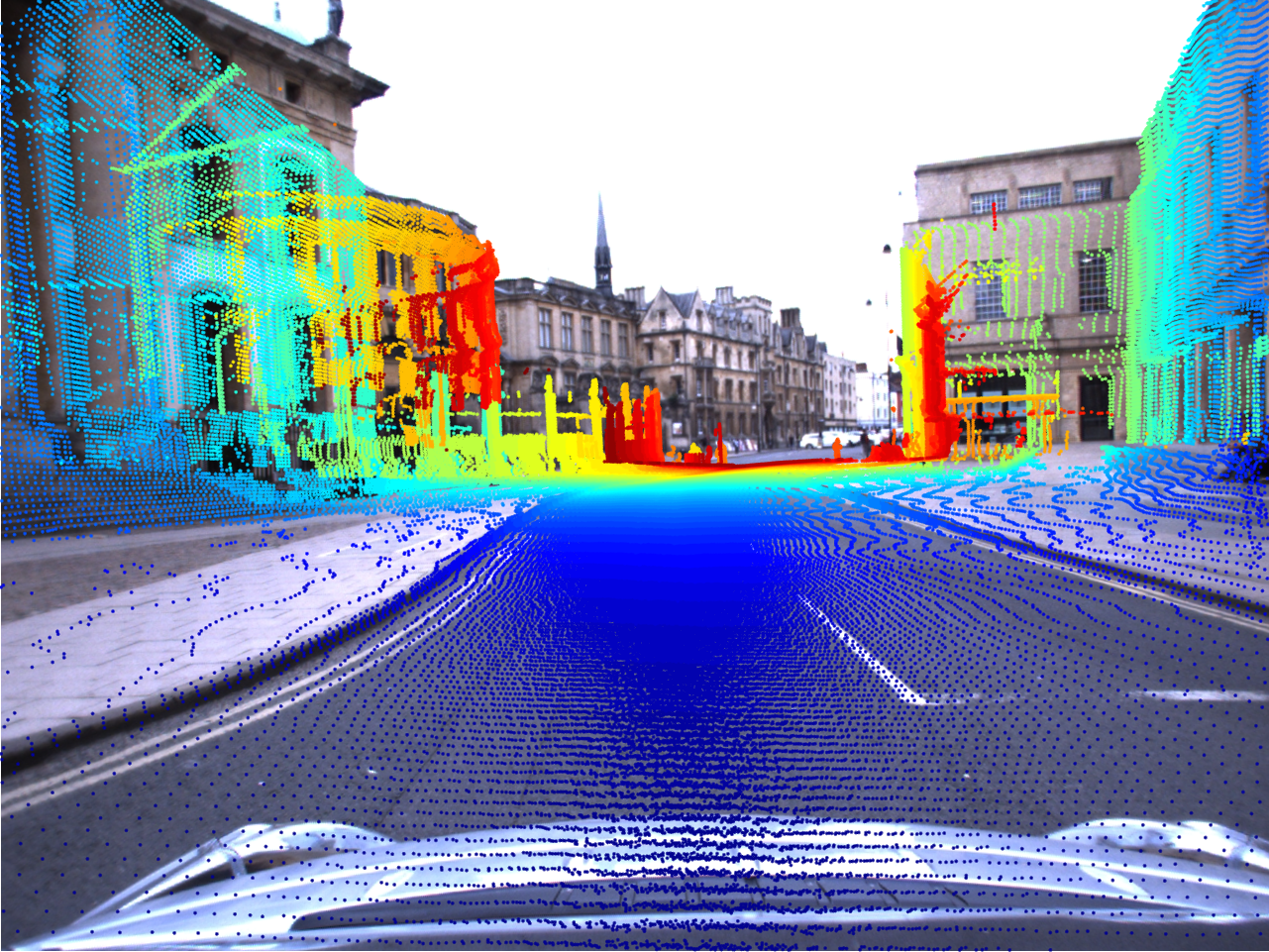
Lidar-punten bovenop de camerabeelden “geplakt”. Bron: University of Oxford..
Het combineren van camerabeelden en Lidar-punten ziet eruit zoals het plaatje hierboven. Van ieder object dat is vastgelegd op de camera bestaat ook een 3D puntenwolk verkregen door Lidar. De computer van de auto moet er nu voor zorgen dat de camerabeelden en de 3D punten correct op elkaar worden “geplakt”. Omdat Lidar en de camera’s de hele omgeving in een 360-view observeren, wordt dit gedaan met behulp van een cirkel en hoeken. Simpel gezegd wordt er een hoek toegewezen aan ieder 2D punt van de camera en ieder 3D punt van de Lidar. Staat er een fietser precies aan de voorkant van de auto, dan krijgen die punten een hoek van 0° toegewezen. Staat de fietser precies aan de achterkant, dan krijgen de punten een hoek van 180° toegewezen.
De hoeken kun je dus zien als een label. Ieder punt heeft nu een hoek-label en door de labels te matchen kun je nu de 2D camerabeelden combineren met de 3D Lidar-punten. We hebben het nu alleen nog niet over de constante π gehad. Over het algemeen worden hoeken uitgedrukt in graden. In de wetenschap en techniek wordt er vaak een andere eenheid gebruikt voor hoeken: radialen. Bij deze eenheid speelt de constante π een belangrijke rol.
Een hoek van 360° is nu gelijk aan 2π radialen en een hoek van 180° gelijk aan π radialen etc. Het plakken van de 3D puntenwolken op de 2D camerabeelden gebeurt dus met hoeken die uitgedrukt zijn in π. Doordat er in de wetenschap veelal met radialen wordt gewerkt, zien we π opduiken bij allerlei soorten toepassingen waar hoeken in voorkomen. En dus ook bij zelfrijdende auto’s!